- A+
时间究竟是什么?这既可以是一个哲学问题,也可以是一个物理问题。古人对太阳进行观测,利用太阳的投影发明了日晷,定义了最初的时间。随着科技的发展,天文观测的精度也越来越准确,人们发现地球的自转并不是完全一致的,这就导致每天经过的时间是不一样的。这点误差对于基本生活基本没有影响,但是对于股票交易、火箭发射等等要求高精度时间的场景就无法忍受了。科学家们开始把观测转移到了微观世界,找到了一种运动高度稳定的原子——铯,最终定义出了准确的时间:铯原子电子跃迁 9192631770 个周期所持续的时间长度定义为 1 秒。基于这个定义制造出了高度稳定的原子钟。
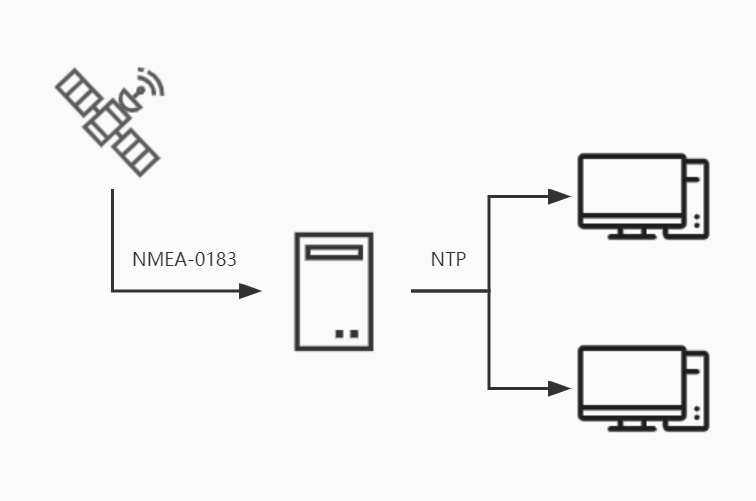
时间在计算机中又是如何定义的呢?通常使用 Unix 时间戳进行表示,记录的是自公元 1970 年 1 月 1 日 0 时 0 分 0 秒以来的秒数。计算机为了维持时钟的走时,硬件层面使用晶体振荡器保障时钟的精确性(也是石英钟的原理),操作系统层面使用时钟中断去更新时间的流逝。现代计算机的硬件设计通常有独立的时钟(RTC),这源于 Intel 和微软创立的标准 High Precision Event Timer(HPET),标准指定了 10 MHz 的时钟速度,因此时钟可以获得 100 纳秒的分辨率。这也是 .NET 时间有关的类型中 Ticks 属性的由来,1秒 = 10000000 Ticks。虽然计算机的时钟已经足够精准,但也会受到环境温度的影响造成过快或者过慢的问题。为了对计算机的时钟进行校准,通常使用 NTP 协议与网络中的时间服务器进行同步。时间服务器的时间又会使用 GPS 接收机、无线电或者是原子钟进行校准。
本文将从 GPS 时间的获取、NTP 报文的编写实现一个“玩具”级别的时间同步服务器,使用 .NET 6 编写一个控制台应用程序,通过本文你可以学到:
- 串口
SerialPort类的使用; - 使用
Socket类实现 UDP 的监听与回复; - 在程序中使用
Process类执行命令行指令; - 了解 GPS 数据报文的
NMEA-0183协议; - 了解 NTP 协议报文。
硬件需求
| 名称 | 描述 | 数量 |
|---|---|---|
| 计算机 | 可以是运行 Linux 的开发板,也可以是运行 Windows 的电脑 | x1 |
| NEO-6M | GPS 模块 | x1 |
| USB 串口 | 可选,使用 USB 串口将 GPS 模块与计算机相连 | x1 |
| 杜邦线 | 传感器与开发板的连接线 | 若干 |
电路
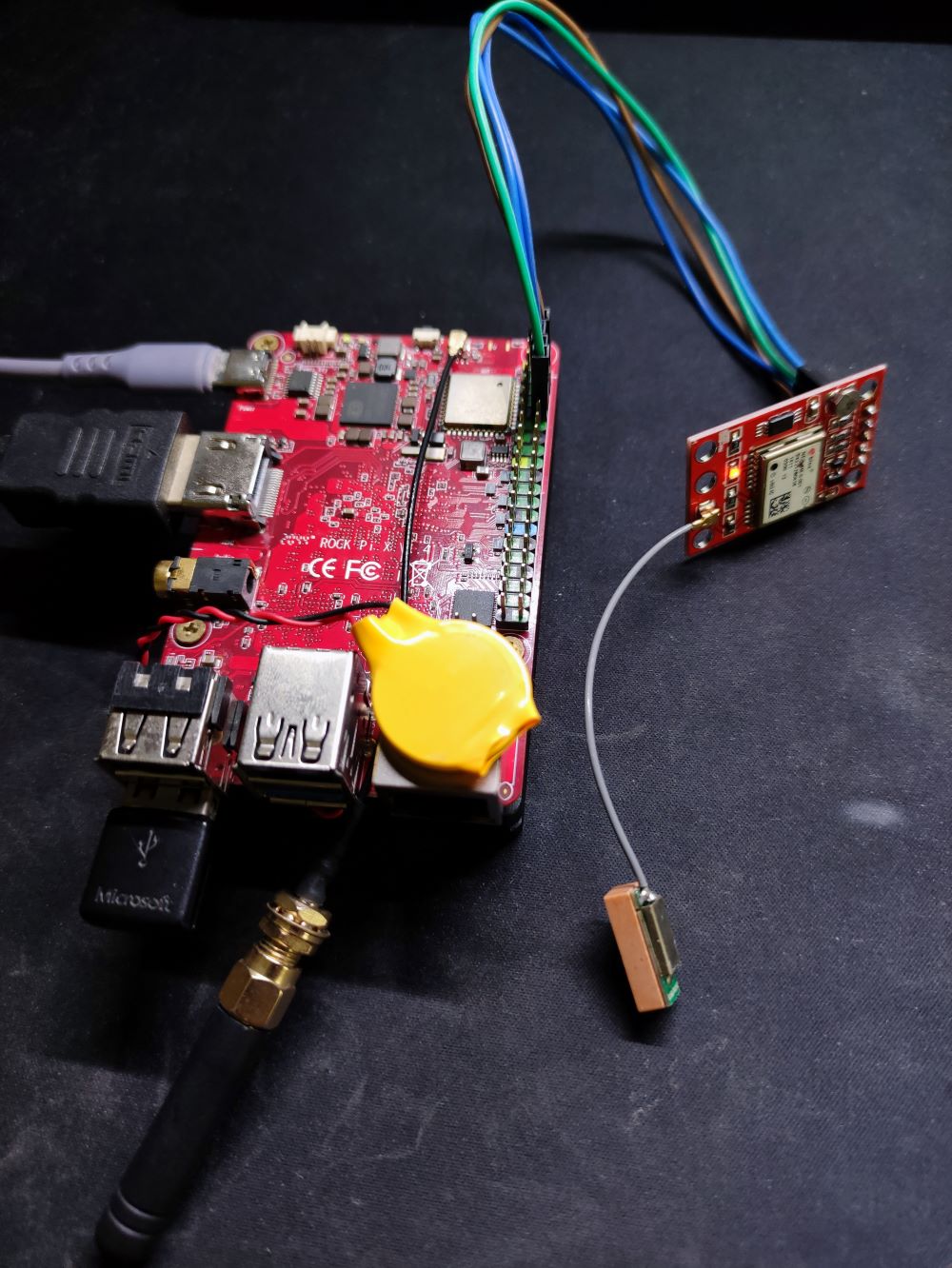
| 传感器 | 接口 | 开发板接口 |
|---|---|---|
| NEO-6M | TX | 开发板或 USB 串口的RX |
| RX | 开发板或 USB 串口的TX | |
| VCC | 5V | |
| GND | GND |
GPS 数据报文的 NMEA-0183 协议
NMEA-0183 是 GPS 设备输出信息的标准格式,是由美国国家海洋电子协会(National Marine Electronics Association)定制的标准。NMEA-0183 有多种不同的数据报文,每种都是独立的 ASCII 字符串,使用逗号隔开数据,数据流长度从 30-100 字符不等,通常以每秒间隔选择输出。NMEA-0183 协议定义的语句非常多,但是常用的或者说兼容性最广的语句只有 $GPGGA、$GPGSA、$GPGSV、$GPRMC、$GPVTG 等。下面给出这些常用 NMEA-0183 语句的解释。
| 帧名称 | 说明 | 最大帧长 |
|---|---|---|
| $GPGGA | 全球定位数据 | 72 |
| $GPGSA | 卫星 PRN 数据 | 65 |
| $GPGSV | 卫星状态信息 | 210 |
| $GPRMC | 推荐最小数据 | 70 |
| $GPVTG | 地面速度信息 | 34 |
由于我们只需要从 GPS 中获取时间信息,选择包含时间信息的 “$GPRMC 推荐最小数据”帧进行解析:
| $GPRMC | <1> | <2> | <3> | <4> | <5> | <6> | <7> | <8> | <9> | <10> | <11> | <12>*<13> |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 帧头 | UTC 时间 | 定位状态 | 纬度 | 纬度半球 | 经度 | 经度半球 | 地面速率 | 地面航向 | UTC 日期 | 磁偏角 | 磁偏角方向 | 模式 * 校验和 |
下面以一个真实的数据帧为例 $GPRMC,013717.00,A,3816.57392,N,10708.73951,E,0.467,,050722,,,A*78:
| $GPRMC | 013717.00 | A | 3816.57392 | N | 10708.73951 | E | 0.467 | 050722 | A*78 | |||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 帧头 | UTC 时间 01:37:17 | A=有效定位,V=无效定位 | 纬度 38 度 16.57392 分 | 北纬 | 经度 107 度 8.73951 分 | 东经 | 地面速率 0.467 节 | 航向 度 | UTC 日期 2022/07/05 | 磁偏角 度 | 磁偏角方向 | A=自主定位,N=数据无效 |
因此,通过串口读取 $GPRMC 数据帧后,需要解析 <1> 和 <9> 字段的值,并将其转换为 UTC 时间。
细心的你也许会发现获取到的时间信息只精确到秒,GPS 明明使用的是原子钟,这是为什么?仔细观察手中的 GPS 模块,还有一个 PPS 针脚没有使用。PPS(Pulse Per Second)是秒脉冲,一般是由 GPS 接收机或原子钟按秒发出的、宽度小于1秒、有着急升或突降边沿的脉冲信号,通常用于精确计时和测量时间。PPS 信号能精确地(亚毫秒级)指示每一秒的开始时间,但不能指示对应现实时间的哪一秒,因此只能作为辅助信号,与卫星导航信息组合使用,提供低延迟、低抖动的授时服务。很遗憾,.NET 目前没法直接操作 PPS 引脚,我们只能实现一个“玩具”级的时间同步服务器了。
NTP 协议报文
NTP(Network Time Protocol),网络时间协议,是一种使用 UDP 的计算机之间进行时间同步的网络协议,位于 OSI 7 层网络模型中的应用层,默认使用的端口为 123。那么使用 NTP 是如何进行时间同步的呢?简单的说将发送的报文打上本机的时间戳,配合报文来回传输的时延修正本机的时间。如下图所示,可以计算出网络传输时延 (delta),以及客户端与服务端的时间偏移 (theta):
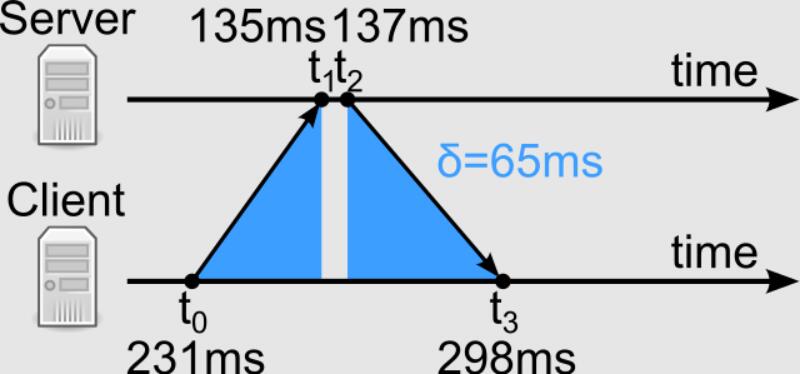
(delta=(t_3-t_0)-(t_2-t_1))
(theta=frac{(t_1-t_0)+(t_2-t_3)}{2})
其中,(t_0) 是请求报文传输的客户端时间戳,(t_1) 是请求报文接收的服务器时间戳,(t_2) 是回复报文传输的服务器时间戳,(t_3) 是回复报文接收的客户端时间戳。客户端和服务端都有一个时间轴,分别代表着各自系统的时间,当客户端想要同步服务端的时间时,客户端会构造一个 NTP 报文发送到服务端,客户端会记下此时发送的时间 (t_0),经过一段网络延时传输后,服务器在 (t_1) 时刻收到报文,经过一段时间处理后在 (t_2) 时刻向客户端返回报文,再经过一段网络延时传输后客户端在 (t_3) 时刻收到服务器报文。这样客户端就可以校准自己的本机时间了。
在了解 NTP 同步时间的过程后,下面解析 NTP 报文具体包含的字段,一般的 NTP 报文长度为 48 字节:
| 字段 | 说明 |
|---|---|
| LI | 闰秒指示,2bit |
| Version | NTP 版本,3bit |
| Mode | 工作模式,3bit ,客户端=0b011,服务器=0b100 |
| Stratum | 时钟层数,8bit,层数为 0 的设备为高精度的时钟(如原子钟),层数为 1 的设备与层数 0 的设备直接相连,…… |
| Poll Interval | 轮询时间,8bit,连续 NTP 报文之间的最大时间间隔 |
| Precision | 时钟精度,8bit |
| Root Delay | 根时延,32bit,表示在主参考源之间往返的总共时延 |
| Root Dispersion | 根离散,32bit,相对于主参考源的标称误差 |
| Reference ID | 参考源的标识,32bit,4 个字符或 IP 地址 |
| Reference Timestamp | 参考时间戳,64bit,本地时钟最后一次被更新的时间 |
| Originate Timestamp | 原始时间戳 (t_0),64bit,客户端发送的时间 |
| Receive Timestamp | 接受时间戳 (t_1),64bit,服务端接受到的时间 |
| Transmit Timestamp | 传送时间戳 (t_2),64bit,服务端发送的时间 |
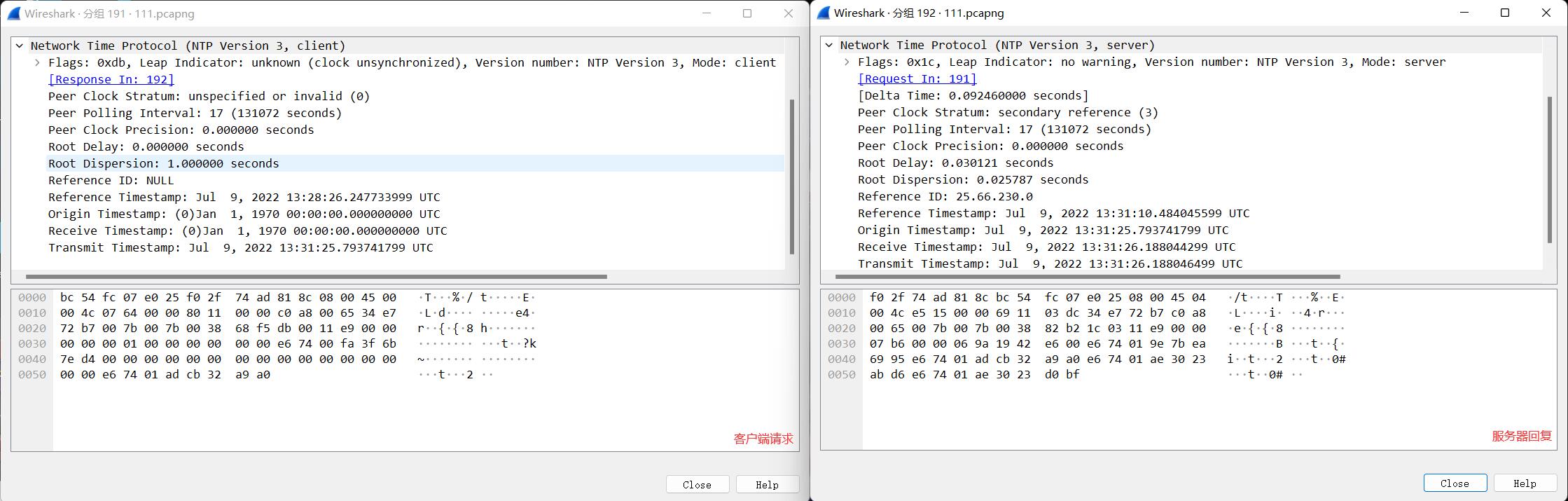
其中要注意的是 NTP 时间戳的起始时间是 1900-01-01 00:00:00,而不是 Unix 时间戳的起始时间 1970-01-01 00:00:00。
下面是使用 Wireshark 抓取的 Windows 时钟同步的 NTP 报文:
编写代码
项目地址:https://github.com/ZhangGaoxing/gps-ntp
项目结构
创建一个控制台应用和类库,项目结构如下:

项目依赖
添加如下 NuGet 包引用:
<ItemGroup> <PackageReference Include="System.IO.Ports" Version="6.0.0" /> </ItemGroup> 配置串口读取 GPS 数据
绝大部分 GPS 模块每秒会通过串口输出 NMEA-0183 协议报文,因此我们只需要通过串口读取需要的时间数据即可。此环节包含 3 个步骤:
- 初始化串口;
- 读取
$GPRMC数据帧的内容,提取时间信息; - 更新系统时间。
初始化串口
使用串口时最重要的属性是波特率,请查阅对应 GPS 模块的数据手册,这里使用的 NEO-6M 模块的波特率是 9600。串口的名称取决于你的连接方式,在 Linux 中串口对应的驱动文件在 /dev 目录下,使用内置串口可能的文件名称为 ttySx,使用 USB 串口可能的文件名称为 ttyUSBx,在 Windows 中串口的名称为 COMx,其中 x 表示的是数字编号。
// 使用的串口名称 const string SERIAL_NAME = "/dev/ttyUSB0"; using SerialPort gps = new SerialPort(SERIAL_NAME) { BaudRate = 9600, Encoding = Encoding.UTF8, ReadTimeout = 500, WriteTimeout = 500, }; 从串口中获取数据
从串口中读取数据时使用的是 SerialPort 类中的 DataReceived 事件。事件(event)可以理解为一种广播,当完成某种操作后向外发送通知。即串口接收到数据后,触发数据处理事件。
gps.DataReceived += GpsFrameReceived; /// <summary> /// GPS 报文处理 /// </summary> void GpsFrameReceived(object sender, SerialDataReceivedEventArgs e) { // TODO:读取 `$GPRMC` 数据帧;提取时间;更新系统时间 } 由于 GPS 模块输出的不只有 $GPRMC 数据帧,因此需要在处理事件中判断帧头以及帧的有效性。
void GpsFrameReceived(object sender, SerialDataReceivedEventArgs e) { string frame = gps.ReadLine(); if (frame.StartsWith("$GPRMC")) { // $GPRMC,UTC 时间,定位状态,纬度,纬度半球,经度,经度半球,速度,航向,UTC 日期,磁偏角,磁偏角方向,指示模式*校验和 // $GPRMC,013717.00,A,3816.57392,N,10708.73951,E,0.467,,050722,,,A*78 string[] field = frame.Split(','); // 帧数据有效 if (!field[12].StartsWith("N")) { // TODO:提取时间;更新系统时间 } } } 在验证 $GPRMC 数据帧有效后,根据帧解析提取对应字段的时间信息。
void GpsFrameReceived(object sender, SerialDataReceivedEventArgs e) { string frame = gps.ReadLine(); if (frame.StartsWith("$GPRMC")) { string[] field = frame.Split(','); if (!field[12].StartsWith("N")) { // 获取 GPS 时间 string time = field[1][0..6]; string date = field[9]; DateTime utcNow = DateTime.ParseExact($"{date}{time}", "ddMMyyHHmmss", CultureInfo.InvariantCulture); // TODO:更新系统时间 } } } 更新系统时间
由于 .NET 并不提供修改系统时间的操作,因此我们要使用间接的方式修改系统时间。一种方式是使用 P/Invoke 调用 C++ 的函数,这种方式可以精确的修改时间,但涉及引用、数据类型转换,过于复杂,和本入门指南不符。这里使用的是运行命令行指令的方式修改系统的时间,但修改时间的精度只能精确到秒。在 Windows 中使用 PowerShell 的 Set-Date 命令,在 Linux 中使用 date 命令。
/// <summary> /// 更新系统时间 /// </summary> void UpdateSystemTime(DateTime time) { ProcessStartInfo processInfo; if (RuntimeInformation.IsOSPlatform(OSPlatform.Windows)) { processInfo = new ProcessStartInfo { FileName = "powershell.exe", Arguments = $"Set-Date """{time.ToLocalTime().ToString("yyyy-MM-dd HH:mm:ss")}"""", RedirectStandardOutput = true, UseShellExecute = false, CreateNoWindow = true, }; } else { processInfo = new ProcessStartInfo { FileName = "date", Arguments = $"-s "{time.ToLocalTime().ToString("yyyy-MM-dd HH:mm:ss")}"", RedirectStandardOutput = true, UseShellExecute = false, CreateNoWindow = true, }; } var process = Process.Start(processInfo); process.WaitForExit(); } 最终报文处理事件由以下代码构成:
void GpsFrameReceived(object sender, SerialDataReceivedEventArgs e) { string frame = gps.ReadLine(); if (frame.StartsWith("$GPRMC")) { string[] field = frame.Split(','); if (!field[12].StartsWith("N")) { string time = field[1][0..6]; string date = field[9]; DateTime utcNow = DateTime.ParseExact($"{date}{time}", "ddMMyyHHmmss", CultureInfo.InvariantCulture); UpdateSystemTime(utcNow); // 记录时钟最后一次被更新的时间 lastUpdatedTime = utcNow; } } } 使用 gps.Open(); 打开串口后就可以获取时间数据了。
实现 NTP 服务
下面使用 Socket 类实现一个简单的 UDP 服务器,用于监听和回复 NTP 报文。
初始化 UDP 服务
// NTP 服务初始化 using Socket ntpServer = new Socket(AddressFamily.InterNetwork, SocketType.Dgram, ProtocolType.Udp); IPEndPoint ip = new IPEndPoint(IPAddress.Any, 123); ntpServer.Bind(ip); 监听和回复 NTP 报文
在后台新建一个进程用于监听 NTP 请求报文:
new Thread(NtpFrameReceived) { IsBackground = true }.Start(); /// <summary> /// NTP 报文接收与回复 /// </summary> void NtpFrameReceived() { // 存储接收到的 NTP 请求报文 Span<byte> receiveFrame = stackalloc byte[48]; while (true) { // 接收请求报文 EndPoint clientPoint = new IPEndPoint(IPAddress.Any, 0); ntpServer.ReceiveFrom(receiveFrame, ref clientPoint); DateTime receiveTime = DateTime.UtcNow; // TODO:回复 NTP 报文 } } 根据帧解析生成 NTP 回复报文:
/// <summary> /// 生成 NTP 报文 /// </summary> Span<byte> GenerateNtpFrame(Span<byte> receivedFrame, DateTime receiveTime) { Span<byte> ntpFrame = stackalloc byte[48] { 0x1c, 0x01, 0x11, 0xe9, 0x00, 0x00, 0x00, 0x00, 0x00, 0x01, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, }; // Client Transmit Timestamp => Server Origin Timestamp for (int i = 0; i < 8; i++) { ntpFrame[24 + i] = receivedFrame[40 + i]; } // 本机时钟最后更新时间 long referenceTicks = (lastUpdatedTime - ntpStart).Ticks; uint referenceTimeInt = (uint)(referenceTicks / TICK_2_SECOND); uint referenceTimeFract = (uint)(referenceTicks % TICK_2_SECOND); var referenceTimeIntByte = BitConverter.GetBytes(referenceTimeInt); var referenceTimeFractByte = BitConverter.GetBytes(referenceTimeFract); // 接收报文时间 long receiveTicks = (receiveTime - ntpStart).Ticks; uint receiveTimeInt = (uint)(receiveTicks / TICK_2_SECOND); uint receiveTimeFract = (uint)(receiveTicks % TICK_2_SECOND); var receiveTimeIntByte = BitConverter.GetBytes(receiveTimeInt); var receiveTimeFractByte = BitConverter.GetBytes(receiveTimeFract); // 发送报文时间 long transmitTicks = (DateTime.UtcNow - ntpStart).Ticks; uint transmitTimeInt = (uint)(receiveTicks / TICK_2_SECOND); uint transmitTimeFract = (uint)(receiveTicks % TICK_2_SECOND); var transmitTimeIntByte = BitConverter.GetBytes(receiveTimeInt); var transmitTimeFractByte = BitConverter.GetBytes(receiveTimeFract); if (BitConverter.IsLittleEndian) { for (int i = 0; i < 4; i++) { ntpFrame[19 - i] = referenceTimeIntByte[i]; ntpFrame[23 - i] = referenceTimeFractByte[i]; ntpFrame[35 - i] = receiveTimeIntByte[i]; ntpFrame[39 - i] = receiveTimeFractByte[i]; ntpFrame[43 - i] = transmitTimeIntByte[i]; ntpFrame[47 - i] = transmitTimeFractByte[i]; } } else { for (int i = 0; i < 4; i++) { ntpFrame[16 + i] = referenceTimeIntByte[i]; ntpFrame[20 + i] = referenceTimeFractByte[i]; ntpFrame[32 + i] = receiveTimeIntByte[i]; ntpFrame[36 + i] = receiveTimeFractByte[i]; ntpFrame[40 + i] = transmitTimeIntByte[i]; ntpFrame[44 + i] = transmitTimeFractByte[i]; } } return ntpFrame.ToArray(); } 最终报文请求与回复由以下代码构成:
void NtpFrameReceived() { Span<byte> receiveFrame = stackalloc byte[48]; while (true) { EndPoint clientPoint = new IPEndPoint(IPAddress.Any, 0); ntpServer.ReceiveFrom(receiveFrame, ref clientPoint); DateTime receiveTime = DateTime.UtcNow; // 回复 NTP 报文 Span<byte> sendFrame = GenerateNtpFrame(receiveFrame, DateTime.UtcNow); ntpServer.SendTo(sendFrame, clientPoint); DateTime sendTime = DateTime.UtcNow; } } 将上述代码进行整合就构成了基于 GPS 的 NTP 时间同步服务器。
部署应用
发布到文件
- 切换到
GpsNtp项目运行发布命令:
dotnet publish -c release -r linux-x64 --no-self-contained - 将发布后的文件通过 FTP 等方式复制到 Linux 开发板;
- 为
GpsNtp文件增加可执行权限
sudo chmod +x GpsNtp - 运行程序
sudo ./GpsNtp 构建 Docker 镜像
- 在项目的根目录中创建
Dockerfile,并将整个项目复制到 Linux 开发板中:
FROM mcr.microsoft.com/dotnet/core/sdk:6.0-focal AS build WORKDIR /app # publish app COPY src . WORKDIR /app/GpsNtp RUN dotnet restore RUN dotnet publish -c release -r linux-arm -o out # run app FROM mcr.microsoft.com/dotnet/core/runtime:6.0-focal AS runtime WORKDIR /app COPY --from=build /app/GpsNtp/out ./ ENTRYPOINT ["dotnet", "GpsNtp.dll"] - 切换到项目目录,构建镜像:
docker build -t gps-ntp -f Dockerfile . - 运行镜像:
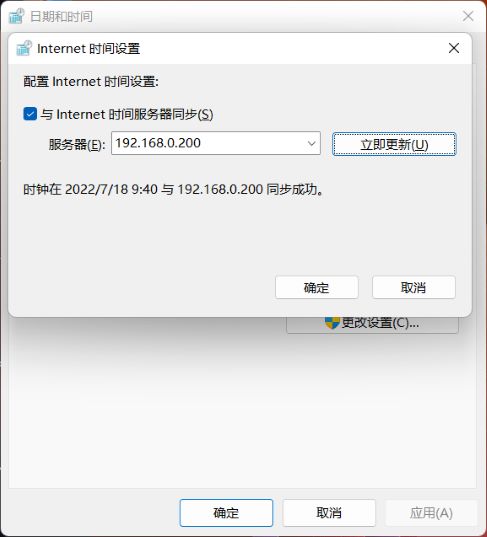
docker run --rm -it --device /dev/ttySx gps-ntp 程序运行后,使用 Windows 时间同步服务进行一下测试。